LEGO EV3 製作室

6本足メカ
2013/12/15
まずは腕試しに、RCXでも作ったお約束の6本足メカを作ってみることに。ところがこれが思いのほか苦労した。重すぎて歩けないのである。

失敗作。ギアが空回りして動けない。

そこでモーターに直付け。これぞダイレクトドライブw
それでも滑るので苦し紛れに足先にギアを装着。
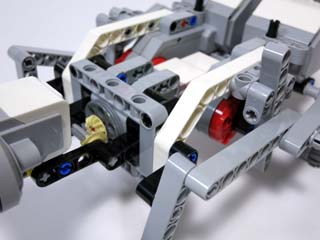
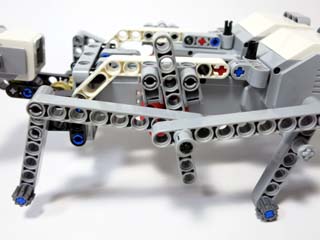
Mモーターがぴったり収まったので、首振り機構を追加。ホイールは指で回すため。
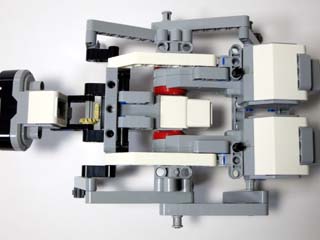
上から。

下から。

横から。

6本足メカ完成!
LabView ブロック図
動画で使用したプログラムを載せる。旋回しつつ超音波センサーで動きを検知し、前進して一定距離になったら停まる。…予定で組んだのだが、実際にはなかなか思ったように動きを検知してくれず、撮影は苦労した(笑)。
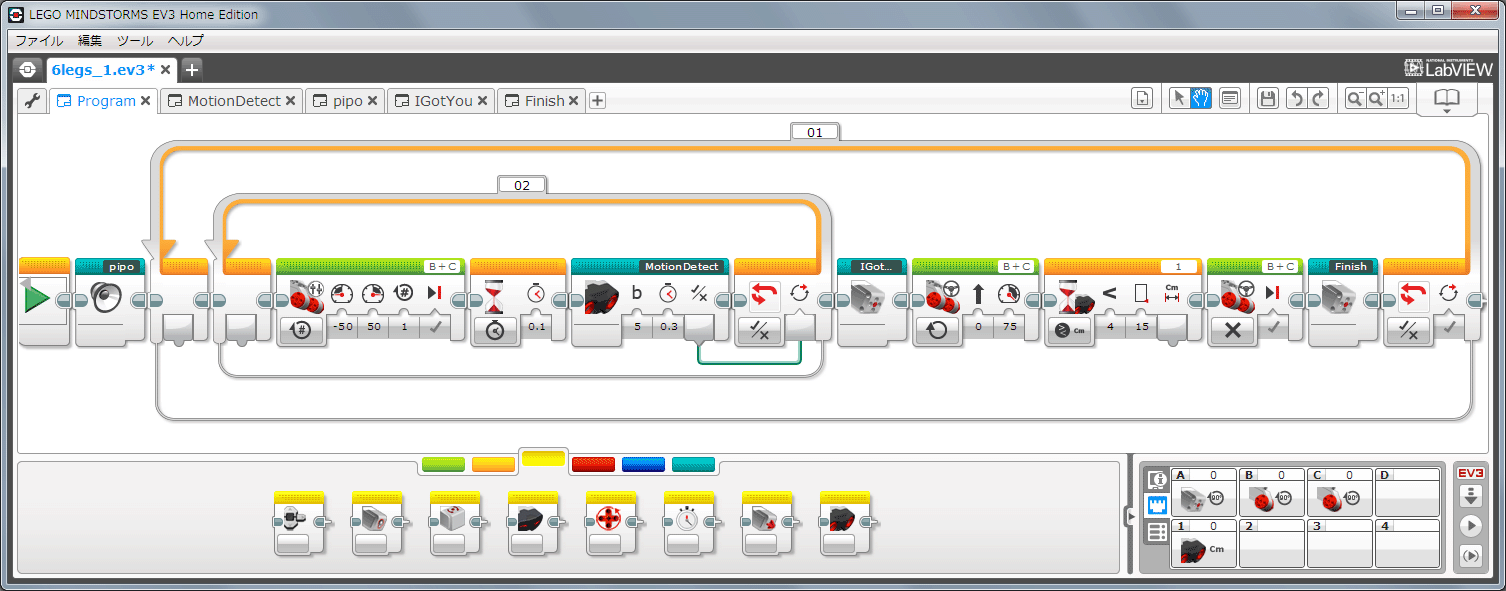
メインプログラム。流れが見やすいように4つのマイブロック(水色のブロック)を使っている。内側のループ[02]で旋回し、動きを検知したらループを抜けて前進する。何かに近づいたら停止して外側のループ[01]で最初に戻るが、デバッグ用にループは実行せずに終了させている。
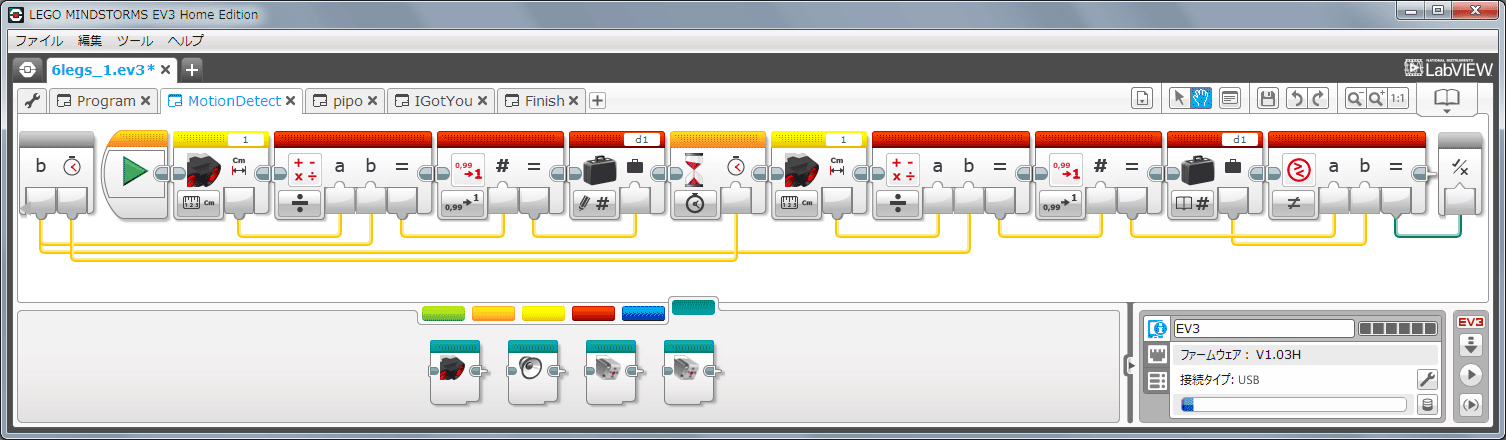
動きを検知するマイブロック。一定の間をおいて超音波センサの値を丸めて比較する。パラメータb(除数)で割って四捨五入するだけだが、演算ごとにブロックを配置するのでこんなに長くなる。
プロジェクトファイルはこちら→6legs_1.ev3